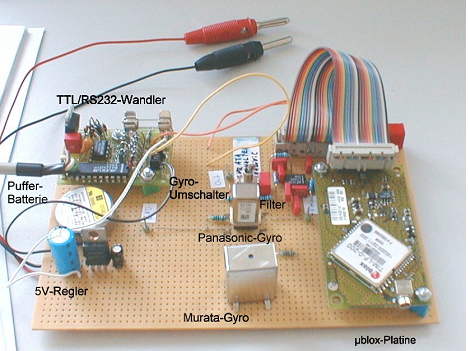
Die Schweizer Firma u-Blox stellt mit dem Antaris SBR-LS eine fertige Platine zur Verfügung, auf der sich ein GPS-Empfänger sowie ein Rechner zur Sensorauswertung befindet. Anzuschließen ist eine GPS-Antenne, Wegimpuls und ein Gyroskop. Ausgegeben wird eine GPS-Position im NMEA Format. Anhand der Datentelegramme ist es möglich zu erkennen, ob gerade ein echtes oder ein berechnetes Positionssignal geliefert wird. [4]
In Abbildung 4.4 ist die Antaris SBR-LS Platine rechts im Aufbau zu sehen. In der Mitte des Testboards sind zwei verschiedene Gyrosensoren montiert, die im Test keine unterschiedlichen Auswirkungen auf die Messergebnisse hatten.
Nachdem sich das System kalibriert hat, wird die vom Hersteller angegebene Genauigkeit erreicht. Maximal 5% Abweichung bei der Wegstrecke, und 3° je Minute bei der Richtung. Für den GPS-Empfänger wird eine Genauigkeit von 3m Circular Error Probable (CEP) angegeben. Die CEP gibt den Radius des Kreises an, in dem bei kreisförmiger Normalverteilung 50% der gemessenen Punkte liegen. Bei nur einer Messung liegt die gemessene Position also mit 50 prozentiger Wahrscheinlichkeit nicht in diesem Kreis.
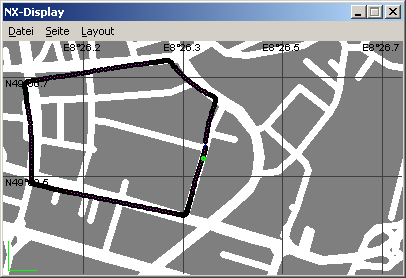
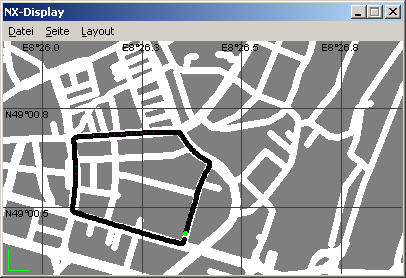
In Abbildung 4.5 sieht man deutlich die Richtungsabweichung wenn kein GPS-Empfang besteht. Um GPS-Ausfall zu simulieren, wurde die Antenne vom Empfänger abgezogen. Abbildung 4.6 zeigt eine Fahrt auf der gleiche Strecke mit GPS-Empfang.
|
|