Sobald mehr als ein Punkt gemessen wurde lässt sich, wie in Abschnitt 5.4 beschrieben, die Richtung des Fahrzeugs bestimmen.
Wenn eine eindeutige Fahrtrichtung zu erkennen ist, wird die befahrene Straße fest ausgewählt. Eine Fahrtrichtung gilt als erkannt, wenn zwei aufeinanderfolgende Messungen um weniger als 10° von einander abweichen. Ein Straßenzug bleibt solange gewählt, bis sein Ende erreicht wird, oder der Kurswinkel mehrmals stark von der Straßenrichtung abweicht. Das Straßenendekriterium kann leider mit den Karlsruher Daten auch erfüllt werden, wenn keine Kreuzung in der Nähe ist, da hier Straßenzüge nicht nur an Kreuzungen enden.
Bei fest ausgewählter Straße wird die verbesserte Position dadurch berechnet, dass zunächst der Unterschied zwischen dem aktuellen Kurswinkel, und den vorherigen Kurswinkel vor der Positionsverbesserung errechnet wird. Mit dieser Winkeländerung wird aus dem vorherigen verbesserten Kurswinkel die aktuelle Richtung bestimmt.
Vom verbesserten vorherigen Punkt aus wird ein Hilfspunkt dadurch berechnet, dass die zurückgelegte Entfernung in der errechneten aktuellen Richtung aufgetragen wird. Dieser Hilfspunkt wird dann auf die ausgewählte Straße verschoben.
Dadurch, dass die Richtungsänderung statt der absoluten Richtung betrachtet wird, wirken sich Fehler bei der Richtungsmessung weniger stark aus. Solche Fehler treten beim Antaris SBR-LS auf, wenn längere Zeit kein GPS-Empfang besteht. Die gemessene Wegstrecke stimmt noch sehr genau, Kurven werden aber häufig zu stark bewertet. Dadurch wandert die gemessenen Position immer weiter aus. Wenn nur die Richtungsänderung betrachtet wird und diese Änderung auf die vorherige Richtung, die aus den verbesserten Punkten berechnet wurde, angewendet wird ist die errechnete Position bei Empfangsausfall genauer.
Bei langsamer Fahrt oder Stillstand kommt es aufgrund der Ungenauigkeit der GPS-Empfängers zur Messung von Positionen, die sogar entgegen der Fahrtrichtung liegen können. Die gemessenen Position schwanken im Rahmen des Genauigkeit des Empfängers.
Das Antaris SBR erkennt von sich aus den Stillstand des Empfängers. Es liefert in einem solchen Fall stets die gleiche GPS-Position und unterdrückt die Schwankungen. Bei Verwendung eines normalen GPS-Empfängers dagegen werden die Messungen an den Bordrechner weitergeleitete, der dann aus diesen Punkten die Fahrtrichtung bestimmt.
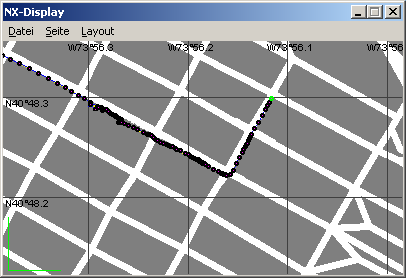
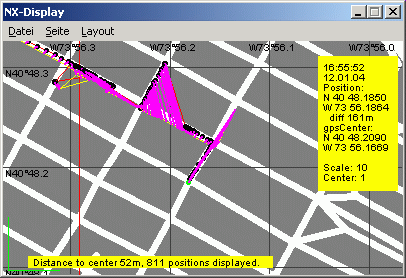
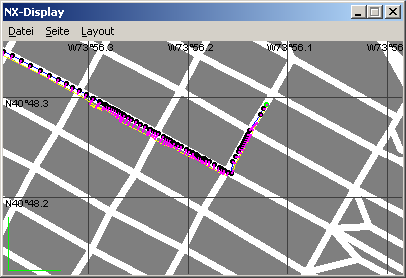
Als Beispiel die unverbesserte Aufzeichnung in Abbildung 5.4. Wenn hier kleine Positionsänderungen nicht gefiltert werden kommt es zu Fehlpositionierungen wie in Abbildung 5.5. Werden dagegen GPS-Punkte, die weniger als zwei Meter von der zuletzt gemessenen Position entfernt liegen, ausgefiltert so liegt die verbesserten Position auf der wirklich gefahrenen Straße wie Abbildung 5.6 zeigt.