Falls eine Sensorunterstützung der Positionsbestimmung mittels Gyroskop und Wegimpuls gewünscht wird, wird das Antaris SBR-LS eingesetzt. Die Verbesserung des GPS-Signals erfolgt transparent, der Bordrechner erhält immer NMEA-Daten. Sowohl bei Verwendung eines Standard-GPS-Empfängers, als auch bei Einsatz des Antaris SBR-LS ist eine Verbesserung der gemessenen Position durch Software erforderlich.
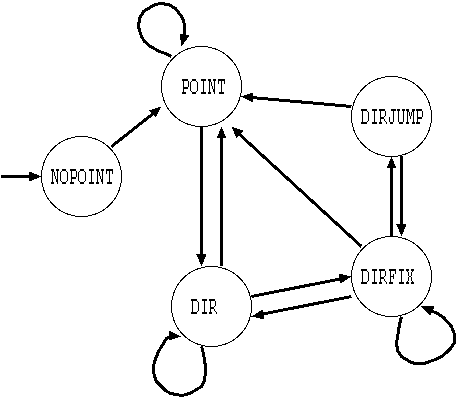
Das anzuwendende Verfahren zur Positionsverbesserung durch Software ist abhängig davon, ob bereits Messwerte vorliegen, oder nicht. Die verschiedenen Fälle werden auf Zustände eines endlichen Automaten abgebildet. Die Zustände des Automaten sind in Tabelle 5.5 aufgelistet, die Bedingungen für Zustandsübergänge in Tabelle 5.6. Der Automat ist in Abbildung 5.7 dargestellt.
|
In jedem Zustand wird, falls die korrigierte Position über 100m von der gemessenen Position entfernt ist, nichtmehr korrigiert, sondern das Verfahren neu initialisiert. Das Bedeutet, die Historie wird verworfen und es wird am aktuellen Messpunkt neu angefangen. Im Test war das nur bei Verwendung eines ,,normalen`` Empfängers erforderlich. Durch dieses Verfahren wird verhindert, dass sich ein von einer GPS-Empfangsstörung verursachter Fehler unbegrenzt lange auf die Verbesserung auswirkt. Messpunkte, die weniger als zwei Meter von der zuletzt gemessenen Position entfernt sind werden nicht verwendet, um die in 5.5.2 beschriebenen Fehler durch Schwankungen bei der GPS-Messung zu vermeiden. Falls der Abstand von der aktuellen gemessenen Position zur vorherigen gemessenen Position größer als 70m ist wird das Verfahren ebenfalls neu initialisiert, da bei Messung eines GPS-Punktes pro Sekunde ein solcher Abstand nur bei einer Geschwindigkeit von mehr als 250km/h erreichbar wäre.
Die Positionsbestimmung des Antaris SBR-LS springt nur, wenn wieder GPS-Empfang besteht und erkannt wird, dass die mittels Kopplenavigation bestimmte Position nicht korrekt ist. Ein Sprung von über 70m deutet also beim Antaris SBR-LS darauf hin, dass die aktuelle Position ein deutlich besserer Messwert als die vorherige Position ist. Beim normalen GPS-Empfänger ist nicht klar, ob der Punkt nach dem Sprung besser oder schlechter als vorher ist.
Die verschiedenen Situationen die bei der Positionsverbesserung unterschieden werden müssen, sind die folgenden:
Falls noch kein Punkt gemessen wurde, wird die Position auf die nächste Straße verschoben, wenn sich eine Straße in akzeptabler Entfernung befindet. (STATE_NOPOINT)
Auch wenn bisher nur ein Punkt gemessen wurde, wird die Position nur auf die nächste Straße verschoben. Mit zwei unterschiedlichen Punkten kann der Kurswinkel bestimmt werden. (STATE_POINT)
Bei bekanntem Kurswinkel wird der neue Punkt ebenfalls auf die Straße verschoben. Der Kurswinkel wird als zusätzliches Kriterium zur Straßensuche verwendet. Wenn der neue Kurswinkel vom vorherige Kurswinkel weniger als 10° abweicht, wird die aktuelle Straße fest ausgewählt.(STATE_DIR)
Wenn eine Straße fest ausgewählt wurde ergibt sich die neue Position aus der alten dadurch, dass vom alten Punkt aus der zurückgelegte Weg aufgetragen wird und diese Position auf die gewählte Straße verschoben wird. Es ist zu überprüfen, ob der Kurswinkel zu sehr von der Richtung der Straße abweicht und ob das Ende der Straße erreicht ist. (STATE_DIRFIX)
Wenn die zuletzt gemessenen Richtung zu stark von der Richtung der gewählten Straße abgewichen ist wird überprüft, ob die jetzt gemessene Richtung wieder mit der gewählten Straße übereinstimmt. Falls eine Übereinstimmung besteht, erfolgt die Positionsverbesserung wie im Fall STATE_DIRFIX. Andernfalls wird der neue Punkt auf die nächste Straße verschoben, wobei der Kurswinkel bei der Straßensuche berücksichtigt wird. (STATE_DIRJUMP)